Musidex
Musidex is a self-hosted music streaming server, with clients for all platforms. Powered by AI and youtube-dl.
Egregoria
Egregoria is a society simulation with high granularity.
Collagol
Collagol stands for Collaborative Game of Life. It's a persistent online game of life universe that
anyone can edit from their browser.
LCPlay
LCPlay is a web interface for Leela Chess Zero, so that any one can play against her online without
needing to install any GPU-related software.
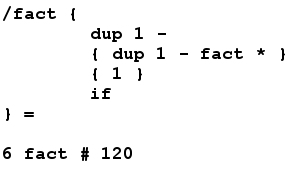
Stacklang
Stacklang is a stack based langage heavily inspired from PostScript.
Numbers Challenge
Numbers challenge is a small android puzzle game about arithmetic.
Supergun Arena
Supergun Arena is a 2 players 2D minigame inspired from Nintendos' Super Smash, where the goal is to
push the enemy out of bounds.